ステレオPIVではライトシートで可視化された粒子像を2台のカメラで撮影します。
カメラは角度差をつけて配置し、角度差から3成分速度を計算します。そのためカメラはライトシートに垂直ではなく斜めから撮影します。
(2台のうち1台はライトシートに垂直に配置することもできます。)
シャインフルーグコンディションによる撮影
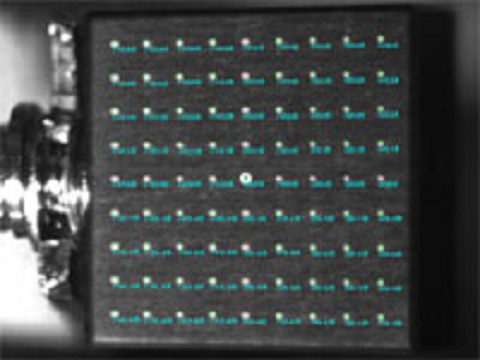
そのため撮影エリアの左右では焦点距離が異なり全域に焦点が合いません。(図1参照)

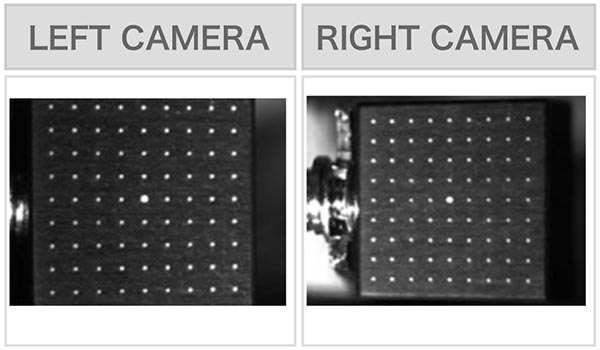
この光学配置をシャインフルーグコンディションと呼びます。(図2参照)

キャリブレーション
ステレオ3次元PIVでは流れ場の3成分の移動量(dX, dY, dZ)を2台のカメラの2成分(dxL, dyL, dxR, dyR)として記録するため、キャリブレーションによってそれらを関連づける必要があります。キャリブレーションによって得られたマッピング関数から3成分速度を算出します。
ステレオキャリブレーションにはさまざまな方法が提案されていますが、Koncertoでは、ピンホールモデルのなかでも特にステレオPIVに適しているとされる、全パラメータを最適化したTsaiモデルを採用しています。Koncerto-3Dの精度は2005年のPIV Challengeで証明されています。
カメラモデルについての参考文献
Assessment of camera models for use in planar velocimetry calibration
Christian E. Willert
Experiments in Fluids (2006) 41: 135?143 DOI 10.1007/s00348-006-0165-2
A Versatile Camera Calibration Technique for High-Accuracy 3D Machine Vision Metrology Using Off-the-shelfTV Cameras and Lenses
ROGER Y. TSAI IEEE JOURNAL OF ROBOTICS AND AUTOMATION, VOL. RA-3, NO. 4, AUGUST 1987
キャリブレーションにはグリッドを刻印したキャリブレーションターゲットと呼ばれるプレートを使います。ターゲットを面外方向にトラバースして3~7断面を撮影し、流れ場の3次元空間位置情報を2台のカメラで記録します。グリッド間隔(X,Y)とトラバース間隔(Z)を入力すれば、カメラセンサー上のピクセル数を実際の流れ場の3次元移動量に置き換えることができます。
キャリブレーション作業の自動化
Koncerto-3Dではキャリブレーションにおける人為的な作業誤差を最小限にするために、ほとんどすべての作業を自動化しています。ターゲットを撮影するたけで、マーカー検出、中心検出、カメラ位置検出等キャリブレーションにかかわるパラメーターをすべて検出し、マッピング関数を計算します。ターゲット画像を撮影したら、1分程度で処理が終わります。ドット検出等のパラメータ設定に要する時間を含めても5~6分で全作業が完了します。
キャリブレーション手順画面
◆ターゲット画像を撮影
平面ターゲットでは3~7断面のターゲット画像を撮影する。多断面ターゲットでは1回の撮影で完了。
オフラインの場合は予め撮影されたターゲット画像ファイルを読み込み。
◆ドット検出
必要に応じてドット検出のパラメータ(最大サイズ、最小サイズ、ドットと周囲の輝度差等)を調整。
(ドットが見えにくい場合は図のようにターゲット画像を非表示に設定)
◆インデックス処理
各ドットの並び順を自動的に検出して番号をふる作業。
◆ターゲット画像の再表示(キャリブレーション精度の確認)
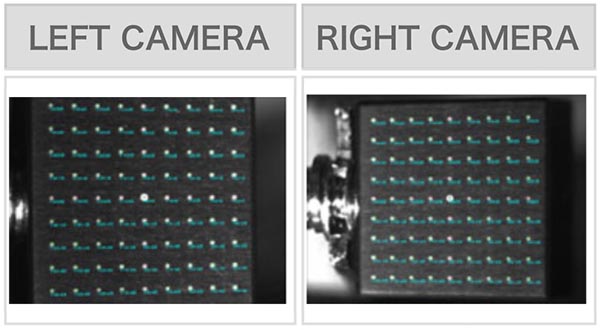
正常にドット検出とインデックス処理が終了した状態。ターゲット画像を再表示。
あとはキャリブレーションボタンを押すと全ターゲット画像に上記の処理を行い、
マッピング関数を計算し完了。所要時間は1分程度。
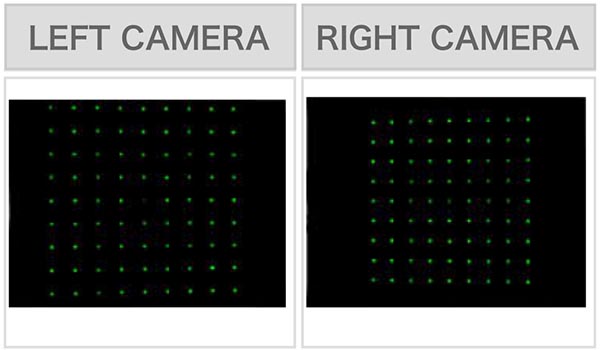
左右のバックプロジェクション像を表示して、キャリブレーションの精度を確認したら計測に入ります。
ディスパリティコレクション
キャリブレーションターゲットはライトシートと同一面に設置しますが、実際にはさまざまな理由で完全に同一面にすることができない場合があり、この物理的な不一致が測定誤差になります。
ディスパリティコレクションはこの誤差を補正するための機能です。2台のカメラで同一時刻に撮影した粒子画像をPIV解析と同様の相互相関解析を行います。それぞれのカメラの画像は斜めから撮影したことにより台形に歪んでいるうえ、距離がちがうため倍率も異なるため、これらの画像を直接相関解析することはできません。
そこでキャリブレーションターゲットの画像情報により2枚の画像を同一倍率の長方形画像に戻すように変形させます。この処理をディワープと呼びます。ディワープ処理を施した2台のカメラの画像は直接相関解析ができます。この相関解析で得られたベクトルマップはディスパリティマップと呼びます。もしターゲットとライトシートの物理的不一致が全くなければ、ディスパリティマップはすべて0になります。
もし物理的不一致があれば変位量として現れます。このディスパリティマップの変位情報からターゲットの位置情報をライトシートと一致させるように補正します。
ステレオ3D-PIVシステムについての詳細はこちらをご覧下さい。
https://www.seika-di.com/measure/piv_sys/item_2